
AI+VSLAM视觉技术革新,瑞芯微助力第四代扫地机器人行业升级
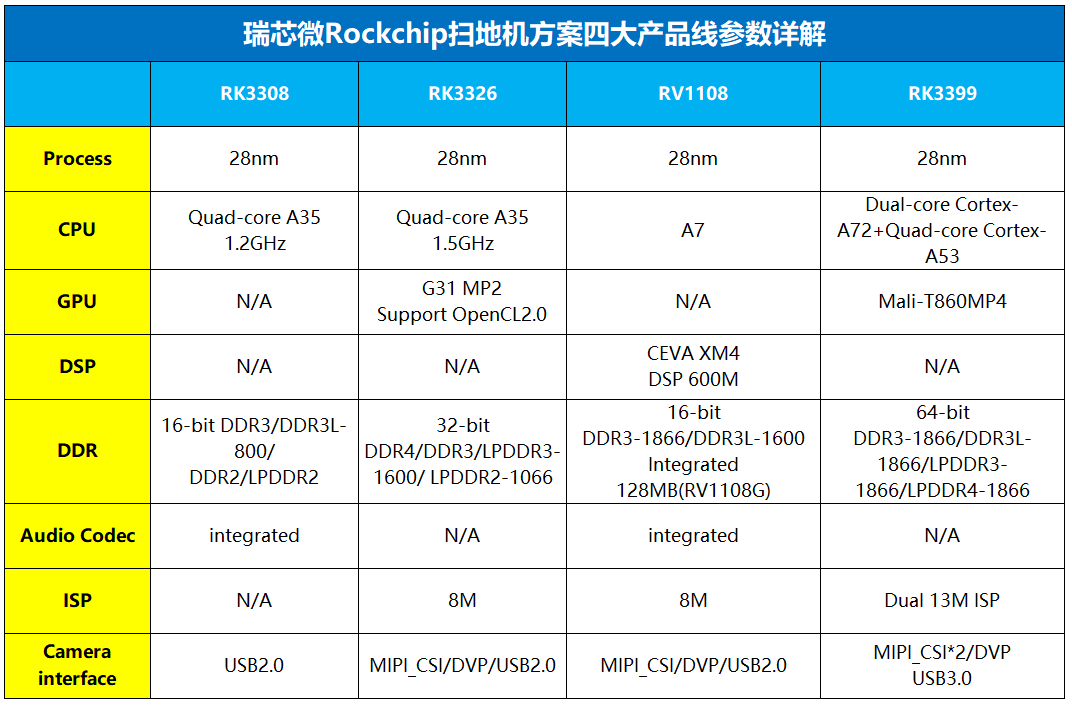
Rockchip向业界发布四款“AI人工智能扫地机器人”芯片级解决方案:RK3399、RV1108、RK3326及RK3308,支持从AI到VSLAM及激光导航等功能,全面覆盖从高端到入门级别扫地机器人产品,并实现快速量产,突破传统行业瓶颈,助力第四代AI人工智能扫地机器人定位导航的标准的定义及升级。
近年扫地机器人行业发展迅速,经随机式、规划式、导航式三代发展,目前仍需较多人工干预操作,交互方式、智能规划、硬件能耗等痛点无法解决,Rockchip发布旗下四款基于Linux系统的芯片级整体解决方案,助力行业升级,高效解决产品痛点。
其中,旗舰级RK3399芯片采用AI+VSLAM定位导航技术,RV1108及RK3326支持VSLAM图像视觉定位导航技术,RK3308可实现主流激光导航技术。

【 旗舰芯RK3399,AI+图像识别+VSLAM定位导航技术 】
Rockchip基于RK3399芯片发布AI+VSLAM定位导航技术,可让扫地机器人导航技术直接跨入第四代,真正实现行业AI人工智能化,配合图像识别、大数据、深度学习、智能算法,将AI人工智能与扫地机器人完美融合。
采用第四代导航技术的RK3399在CPU/GPU芯片上,基于视觉识别技术和AI算法,打破原有VSLAM技术对光线条件依赖的局限,不仅可应用于弱光、弱纹理、强光等光线复杂室内场景,更可智能识别室内百种图像物体、分类记录、视觉测距和避障,规划最佳清扫路径。
在人机对话,语音交互方面,支持多麦阵列、远场语音控制,扫地、拖地都可通过语音控制完成,并且可支持双目视觉算法。
【 主流芯RV1108、RK3326、RK3308 】
RV1108 & RK3326 特点:
VSLAM图像视觉定位导航技术
RK3308 特点:激光SLAM定位导航技术
本次发布的RV1108及RK3326芯片级整体解决方案,均具备VSLAM图像视觉定位导航技术,虽然这两大导航技术已经应用成熟,但Rockchip全新方案在硬件性能上却更具优势,为满足不同客户研发需求,两类芯片方案在VSLAM算法的实现方式做了区分:
RV1108可支持在DSP上实现VSLAM算法,内置8M ISP,可同时支持3D相机,对于使用VSLAM定位导航技术的客户而言,可适应更复杂的使用场景;支持MIPI CSI接口,选择Camera Sensor模组的范围更广。
RK3326可支持VSLAM算法在CPU/GPU端的技术实现,RK3326的GPU 采用G31,可支持Full profile OpenCL2.0,可快速在GPU上实现VSLAM算法,CPU+GPU协同工作,可以发挥更好的性能。
RK3308可实现主流扫地机器人的激光导航技术,采用64-bit Cortex A35架构,相较同类采用40nm Cortex A7方案,Rockchip方案均采用28nm工艺的性能更高、功耗更低的新处理器,可有效解决芯片发热问题,对于内置电池的扫地机器而言尤为重要。
【 瑞芯微第四代扫地机器人 五大技术优势总结 】
在技术看点上,相较传统扫地机器人解决方案,Rockchip四大解决方案均具备以下优势特性:
1、支持AI深度学习
2、优越的系统综合性能
3、具备智能语音交互系统,支持语音控制
4、针对性系统优化,<2秒快速开机
5、弹性硬件方案定制设计,性价比更高
【 创新!硬件弹性设计 】
Rockchip在扫地机器人生态上,拥有很多算法合作伙伴以及ODM/OEM客户,涵盖了激光,VSLAM,AI等方向,可实现快速量产。针对行业客户不同的产品创新需求,Rockchip还对四大扫地机器人解决方案进行了硬件弹性设计。在周边料件上,RK3399、RV1108、RK3326、RK3308可为 DDR/WIFI/BT/Camera/Nand Flash/EMMC等关键元器件提供更为广泛的支持列表。对合作伙伴而言,将极大提升市场竞争力。
在快速增长的行业背景下,Rockchip凭借在人工智能、图像视觉、芯片技术的积累,首次发布的解决方案相较传统产品极具颠覆性。与全新物联网(IoT)、人工智能等技术结合,将使白电市场在有限改变中获得了更多突破的机会。
嵌入智能技术的家电不仅成市场化趋势,对于当前的家电产品智能化转型升级来说,依托用户的生活场景、商务场景,打造家电的人工智能解决方案是大势所趋,也将更符合人工智能与物联网时代特性。
